
一只小型机器人能跳 10 层楼高,它是怎么做到的?
普通人一跃不过两、三英尺,即使是动物王国中那些跳跃健将也很难把成绩提高一个数量级。
但机器人可能!先前垂直跳高纪录的保持者仅勉强跳过1层楼的高度,但如今这道标线已经变成了10层楼高。成绩来自一部重量不及网球的机器人,它跳出了102英尺(31米)高,相当于从自由女神像的脚部直接蹦到眼部位置。

这项技术可能在行星探索领域发挥重大作用。由于月球的引力强度仅为地球的六分之一,这种小型跳跃机器人能够垂直跳跃超410英尺、横向跳跃超1600英尺,由此轻松前往人类因大气稀薄/地形不稳而难以前往的样本/数据收集位置。而且这方面的探索已经起步,机器人的开发者Veritasium正在研究如何让设备自我调整以准备下一轮起跳。
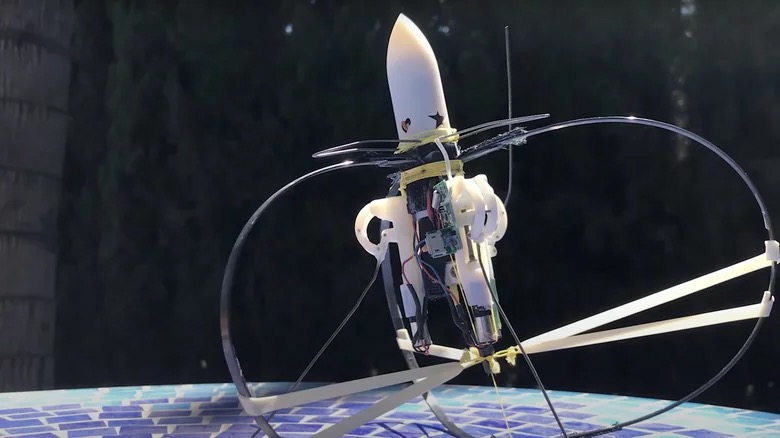
这么小的机器人是怎么蹦起30多米的?视频显示,为了严格符合“跳跃”的定义,这些机器人不能像火箭那样消耗燃料、也不能像箭那样进行额外的能量转换。总之,这台机器人只能靠自身设计和结构跃起。这台机器人由四个碳纤维拱结构实现推进,这些拱结构通过松紧带系在中央的支撑轴上。

机器人顶部的瓶鼻状隔槽内装有一部电机,通过绳子连接至支撑轴。当电机启动,它会卷起绳子、缩短支撑轴长度并拉动碳纤维拱收缩。这种形态收缩就如同弹簧,当电机松开绳子后,碳纤拱的回弹就将机器人向上推起。而夸张的弹跳高度要归功于其轻的结构,最终达成的创纪录成绩不禁让人们对它在太空中的表现充满期待。
好文章,需要你的鼓励


微软推出Memora,致力于解决AI智能体的记忆难题
微软研究院发布Memora记忆系统,旨在解决AI智能体在长期部署中记忆碎片化、检索效率低的问题。Memora通过将存储内容与检索方式解耦,引入"主抽象"与"线索锚点"双组件架构,在LoCoMo和LongMemEval两项基准测试中表现优异,上下文token用量最高可降低98%。但专家提醒,实际企业成本还需考虑索引、存储及合规审计,且该项目目前仍处于研究阶段,尚未达到生产就绪水平。

马里兰大学研究团队揭秘:机器人AI的“语言大脑“到底有多臃肿?
这项马里兰大学与思科研究院的联合研究发现,VLA机器人模型的语言模块存在严重冗余——砍掉一半语言层后成功率不降反升,而视觉和动作模块则高度敏感。

SGE计划在英国部署14座BWRX-300小型模块堆,总装机容量达4.2吉瓦
波兰小型模块化反应堆开发商SGE宣布计划在英国三个地点部署14台GE Vernova Hitachi的BWRX-300机组,总装机容量达4.2GW,可满足英国约11%的电力需求。该项目已依据英国《先进核能框架》提交申请,采用差价合约融资模式,预计2026年11月进入先进核能管道,首台机组目标于2034年投入商业运营。

验证太急,反而会帮倒忙——以色列独立研究员揭示多智能体AI系统中“过度纠错“的危险陷阱
研究揭示多智能体AI系统中验证存在"最优剂量":纠错太强或延迟太长会让AI团队陷入震荡,黄金比例倒数0.618是延迟两轮时的精确稳定阈值。
2023
01/05
09:54
分享
点赞

SGE计划在英国部署14座BWRX-300小型模块堆,总装机容量达4.2吉瓦
特斯拉在迈阿密划定Robotaxi小范围服务区,得克萨斯扩张仍受阻
Luxonis完成1400万美元融资,为智能自动化打造视觉感知层
.NET 8 与 .NET 9 即将停止支持,微软建议升级至 .NET 10
苹果供应商塔塔电子遭黑客攻击,iPhone 18 Pro核心机密外泄
美国解除对Anthropic旗下Fable 5和Mythos 5大语言模型的出口限制
Meta推出定制CXL芯片Vistara,让旧内存在新服务器中焕发新生
Bending Spoons完成180亿美元IPO,创始人谈如何将运气从成功方程式中剔除
浏览器大战进入新阶段:Chrome与Safari之外的最佳替代选择
华盛顿特区都会区迎来首批途中电动公交充电桩
Meta即将发布具备更强编程能力的全新AI模型
2025年AI核心术语完全指南
